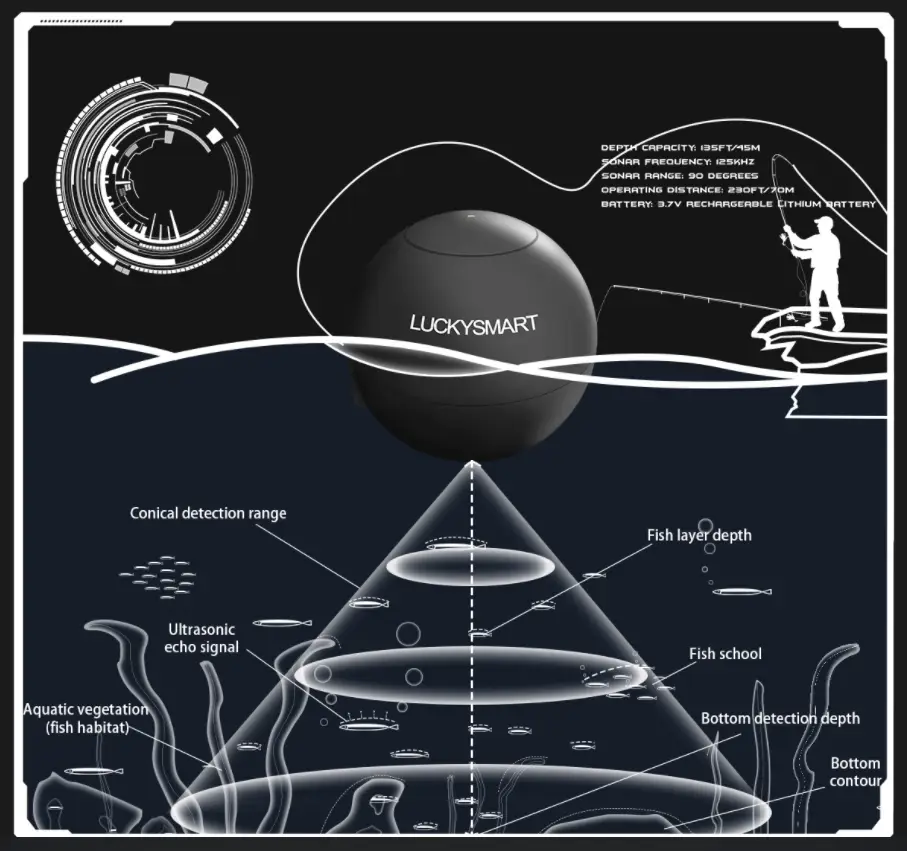
Принцип работы эхолота основан на технологии эхолокации. Устройство сначала излучает сонарный сигнал, а затем принимает эхо, отражённое от встреченных объектов. Рассчитывая временную задержку между отправкой и возвратом сигнала, прибор определяет расстояние до цели.
Первый прототип эхолокационной технологии появился в начале XX века. Первая мировая война дала мощный толчок её развитию: срочная необходимость обнаруживать вражеские подводные лодки ускорила совершенствование подобных устройств. Однако в то время эхолокационные приборы были громоздкими и сложными в эксплуатации.
Со временем они стали точнее и компактнее, но вплоть до окончания Второй мировой войны использовались почти исключительно в военных целях.
В 1950-х годах известный исследователь и опытный рыбак Карл Лоуренс вместе со своими сыновьями начал разработку компактного гражданского сонарного устройства, специально для рыбалки. Основываясь на многолетних подводных исследованиях, Лоуренс был уверен в высоком рыночном спросе на такую технику.
Исследования показали, что в обычных водоёмах около 90% рыбы сосредоточено всего в 10% акватории. Кроме того, распространение рыбы зависит от множества факторов: время суток, температура воды, солнечный свет, направление ветра и наличие корма. Поэтому рыба постоянно перемещается, адаптируясь к условиям среды.
Семье Лоуренс удалось уменьшить размеры сонара 87за счёт замены традиционных вакуумных ламп на транзисторы. В 1957 году компания Lowrance представила первый в мире компактный эхолот, созданный для любительской рыбалки.






{kind=link}